
February 2022 Issue
Research Highlights
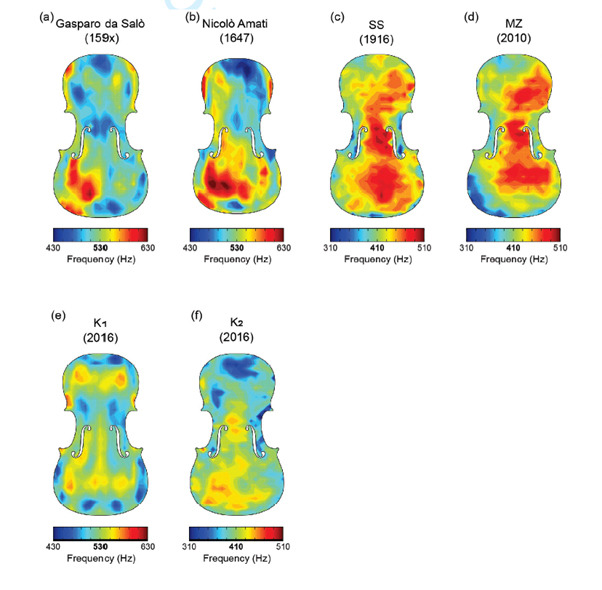
Violins made by instrument makers in northern Italy up to the early 19th century are world-famous for their sound. Violins from that epoch have been thoroughly analysed by modern methods in order to understand — and replicate — their superior acoustic qualities. Specifically, the shapes and sizes of old Italian violins have been studied in detail, which helps to comprehend, to some extent, the original design of these instruments. However, because not all violin-making technical know-how was consistently passed on to apprentices, it is not entirely clear today how exactly the renowned designs of the ‘old’ Italian violin builders were conceived. Now, Eriko Aiba from the University of Electro-Communications and colleagues report that frequency maps derived from the sounds obtained by tapping a violin’s top plate are valuable acoustic characteristics, and suggest that such tapping may have been a key technique used by the famous Italian violin makers from centuries ago.
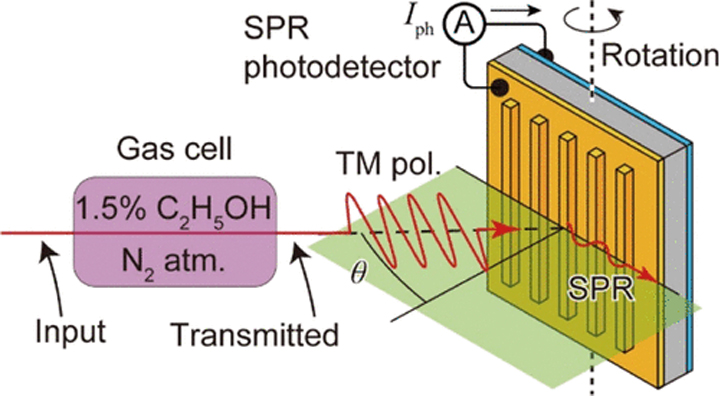
Small gas sensors are used in many settings for detecting specific gases — for example, recognizing explosive or smelly gases — or for analysing the composition of atmospheric gas. Most gas-sensing methods require a separate sensor for every type of gas. Yet, in light of on-going efforts to miniaturize such devices, a single detector that can sense different gases is highly desirable. One approach towards ‘unified’ sensing relies on spectroscopy: by analysing the absorption frequency spectrum of light passing through a gas mixture, the components of the mixture can in principle be identified. Now, Tetsuo Kan from the University of Electro-Communications and colleagues report the successful application of spectroscopic sensing in a miniaturized setup. The principle behind the sensor is so-called reconstructive spectroscopy, in which a spectrum is not directly measured, but reconstructed by converting other measured quantities. The scientists’ spectrometer reaches a wavelength resolution of 20 nm, and, by way of test, was able to detect ethanol gas.
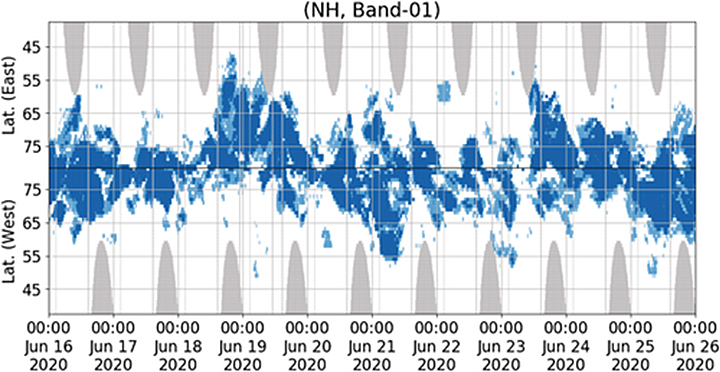
Polar mesospheric clouds (PMCs), also called noctilucent clouds, occur in the upper layer of the Earth’s atmosphere, the so-called mesosphere, at altitudes between 76 km and 85 km. They consist of ice water particles and can typically be observed at high latitudes at night when the lower part of the atmosphere is already in the Earth’s shadow but the upper part is still in the sunlight. Since 2007, PMCs are being studied from space by means of the NASA-operated AIM (Aeronomy of Ice in the Mesosphere) satellite, a low-Earth-orbit satellite launched with the aim to better understand why PMCs form, and what the origin of their variations is. Now, Takuo Tsuda from the University of Electro-Communications and colleagues have looked into the possibility of using data from a geostationary-Earth-orbit (GEO) satellite to detect PMCs. They developed a two-step processing scheme for data recorded by the GEO Himawari-8 satellite operated by the Japan Meteorological agency, and found that results generated in this way can be used for scientific PMC research.
Research Highlights Archives
December 2021
-
Sleep science
Frequency analysis helps to understand sleep disorder - Educational measurement
Modelling performance assessment
September 2021
-
Recognition technology
Radar-based human recognition for self-driving cars - Quantum state estimation
Getting the most out of quantum systems
June 2021
- Efficient & reliable data processing for scalable Internet of Things: Innovative amplify-and-forward-based AirComp
- Innovative building blocks for the quantum internet: All fiber platform for quantum photonic processing on tapered optical fibers
- Bacteria in the spotlight:
Bacterial community exhibits only counterclockwise movement
March 2021
-
Solid state physics
A candidate excitonic insulator under pressure - Machine learning
Improving the counting capability of Internet-of-Things systems
February 2021
- Innovative automated control systems: Control-theoretic approach for fast online reinforcement learning
- Computing in close proximity: Edge intelligence with deep reinforcement learning
March 2020
- In vivo bioimaging: technology to elucidate sex-dependent differences in skeletal muscle function
- MEMS technology for fabricating plasmonic near-infrared spectrometers
December 2019
- Stretchable electric pumps for next-generation soft robotics
- Inspecting dust on surfaces in product manufacturing: Effect of dirt on inspection surfaces on the accuracy of visual inspection
- Polymer-based optical fiber for visualization of stress
September 2019
- Control of snake-like robots for high mobility and dexterity
- Time-saving simulation of peeling graphene sheets
- Convenient synthesis of biopharmaceutic-Fc conjugates: Semi-synthesis and evaluation on the extension of their circulating plasma half-lives
June 2019
- Multiple Sensor Fusion Technology for Non-contact Measurement of Vital Signs and its Clinical Applications
- Frontiers of state of the art precision molecular spectroscopy
- Technology for processing wood powder with natural additives
March 2019
- JST-ERATO Intelligent Optical Synthesizer (IOS) Project
- Adaptive learning system using big data based machine learning
- Drag reduction and relaminarization of wall-turbulence by traveling wave control
December 2018
- Soft robotic gripper based on dielectric elastomer actuators
- Digital Public Media: Mid-air Display Technology
- Molecular materials with ultralong-lived room-temperature triplet excitons: Persistent room-temperature phosphorescence and nonlinear optical characteristics under continuous irradiance
September 2018
- Next Generation Router Architecture: Packet Processing Prediction
- Elucidating mechanisms of voluntary control of human multi-muscle
- Isotropization of Quaternion-Neural-Network-Based PolSAR Adaptive Land Classification in Poincare-Sphere Parameter Space
June 2018
- Photonics research: Controlling photons with a photon
- Innovative photovoltaic materials: CsSn1-xPbxI3 nanocrystals as phase-stable perovskites
- Technology for visualizing flow of blood to aid neurosurgery in the human brain
- Computational intelligence-inspired clustering in Multi-access Vehicular Networks
March 2018
- Aurora-induced atmospheric composition change: Global sodium variation revealed by optical spectroscopic observations from the space
- Developing Robots That Can Learn Like Humans
- Electron transfer and oxidative damage in DNA under biomimetic crowding environment
December 2017
- Hierarchical Opportunistic Routing with Moderate Clustering for Ad Hoc Networks
- Kerr-lens mode-locked Tm doped sesquioxides laser in-band pumped by an Er:Yb fiber MOPA 1.6 μm
- Geospatial information extraction from SNS: Who said what from where!
- Information science offers insights into the performance of pianist: Efficiently reading piano musical scores by analyzing geometrical information in musical notes
September 2017
- Radar for environmental monitoring: New algorithms for high speed and low cost 3D imaging
- Astronomical spectroscopy in a laboratory: Direct and accurate measurements of electron densities of plasmas
- Laser science: Innovative solid state lasers with Yb3+-doped CaF2 - LaF3 ceramic gain media
- Two dimensional materials: Advanced molybdenum selenide near infrared phototransistors
- Nanophotonics: Integrating nanocavities into optical fibers with femtosecond laser ablation
June 2017
- Prosthetic limbs made user-friendly with polymer based elastic sensors.
- Digital to analog convertors generate bipolar voltages when coupled to a polarity switchable double flux amplifier
- Inference of Bayesian networks made fast and easy using an extended depth-first search algorithm
- Robotic vision sensors based on light sensitive bacterial proteins
March 2017
- Nanoparticle-polymer composites boost holographic data prospects
- Relativistic effects pack a punch in high-temperature plasma collisions
- Spectrometry: Miniaturising near-infrared devices
- Hybrid rockets: Optimizing performance using design informatics
December 2016
- Network traffic anomaly detection - machine learning
- Coding theorem defines decoding error capacity for general scenarios
- Engineering: Improvements to a decision-making algorithm
- Speech signal processing: Enhancing voice conversion models
September 2016
- Quantum computing: Trapping single atoms in a uniform fashion
- Physiology: Cell pH regulation revealed
- Neurology: A closer look at walking control
- Space physics: Confirming the structure and shape of polar cap patches
June 2016
- Bose-Einstein condensates miscibility properties reveal surprises
- Brain diseases: Unlocking potential from MRI data
- Auditory systems: Modelling bats' information processing
March 2016
- Graph-based data mining reveals patterns in learning space use
- Task allocation: Computing the logistics of snow-plowing
- Metal mesh filters: Calculating pressure drop
- Environmentally friendly refrigerant measures up
December 2015
- Wireless transceivers: Hardware still limits the unlimited
- Walking control: Influence of lower limb co-ordination
- Snake robot range-sensing control system avoids tail-end collisions
- Random additions efficiently anonymize large data sets
September 2015
- Nanowire quantum dot solar cells: oxide layer boosts performance
- Motor behaviour: understanding the jerks that lurk in smooth movements
June 2015
- Star formation: Exotic chemistry
- Physics of semi-metals: Insights into electron transport in bismuth
- Multiterminal source coding: deciphering noisy observations
March 2015
- Quantum optics: Understanding spectral properties of broadband biphotons
- Motor memory: the long and short of it
- Human Interface: Virtual robotization for human limbs
December 2014
- Next generation mobile communications: World's first successful use of an electric circuit to compensate for distortions in electric signals due to heat
- Magnetic vortices: Controlling core switching in Pac-man disks
- Underwater robotics: Analyzing the propulsion of a soft robotic fish
- Artificial intelligence: Brain-training for baseball robot
September 2014
- Silicon nanophotonics: controlling photoluminescence for better devices
- Micromanipulators: Taking the future in hand
- Depth perception - understanding ambiguities
- Internet protocol networks: Optimizing link reinforcements
June 2014
- Pharmacophores: The future of drug discovery
- Hybrid solar cells: The Mechanism of dyeing for greater efficiency
- Control systems: Fuzzy features
- Optical signal processing: Neater networks