March 2018 Issue
Research Highlights
Developing Robots That Can Learn Like Humans
Recently, there have been remarkable advances in artificial intelligence (AI). It is said that AI is superior to human intelligence in supervised learning where vast amounts of labeled data is used to perform specific tasks. However, it is considered that it is difficult to realize human-like intelligence using only supervised learning because all supervised labels cannot be obtained for all the sensory information required by robots.
Here, Tomoaki Nakamura of UEC, Tokyo, and colleagues are conducting research on the realization of robots that can acquire knowledge in a manner similar to human beings.
To this end the researcher believes that it is important for robots to understand their environment by structuring their own sensory information in an unsupervised manner.
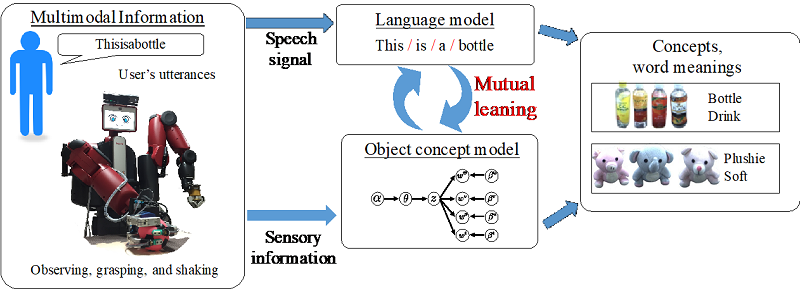
Recently, Nakamura proposed an algorithm that enables robots to learn concepts and language [1,2]. The robots obtain multimodal information from objects, and linguistic information by communicating with others. Using this information, the algorithm allows robots to form object concepts and learn languages. Moreover, concepts that are learned by robots using this algorithm are compared with the corresponding human concepts and the similarities between them are shown [3].
Nakamura has also proposed a method for robots to learn motions by observing human motion [4]. Additionally, this method also allows robots to learn the rules of interaction by observing human interaction.
"Through this research, I would like to develop robots like humans," says Nakamura. "Additionally, I believe that this research will lead to a better understanding human intelligence."
Reference