
December 2018 Issue
Research Highlights
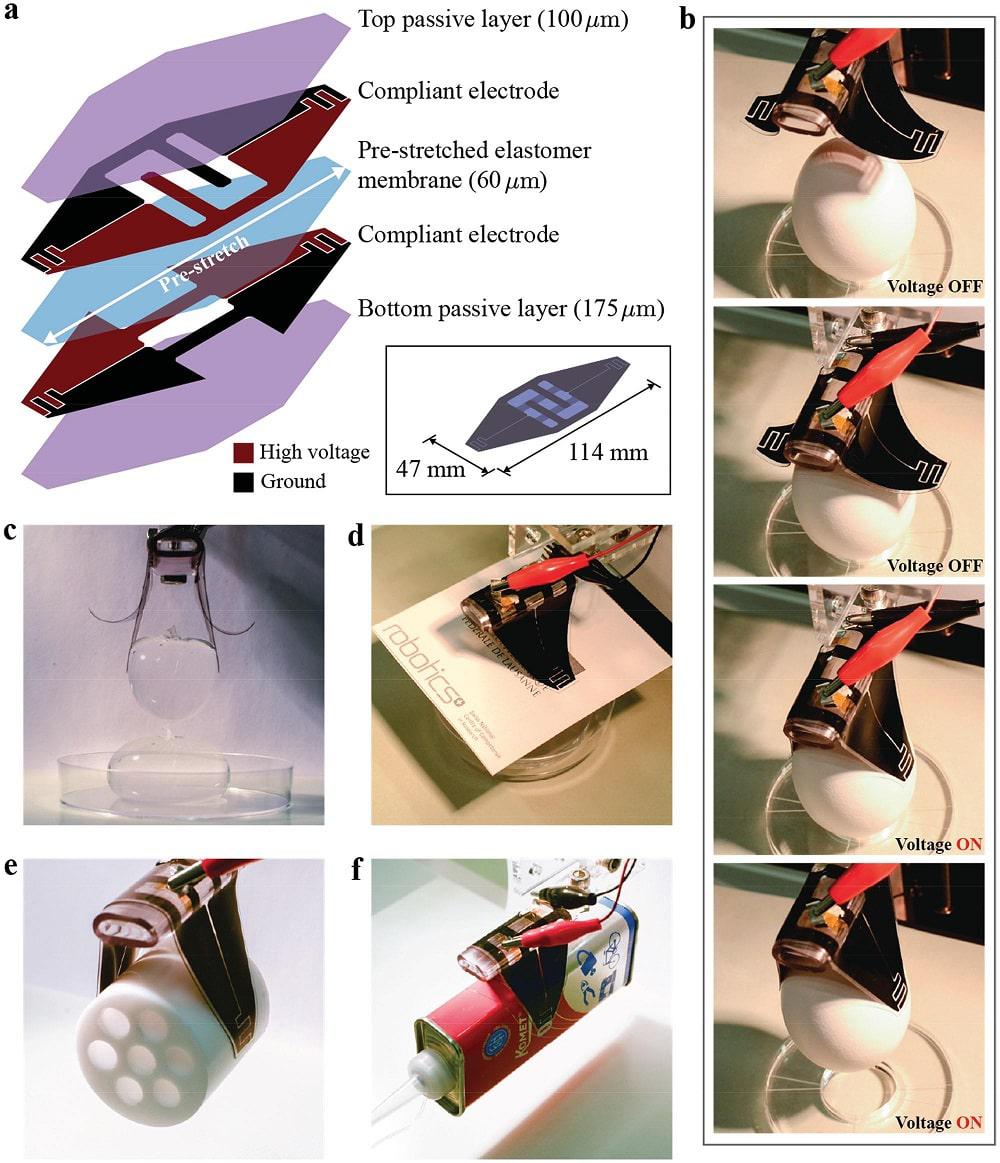
Soft robotic gripper based on dielectric elastomer actuators
Soft robots that are composed of compliant materials offer important advantages over conventional rigid robots, such as simplified body structure and control, as well as high robustness and versatility.
Dielectric elastomer actuators (DEAs) are soft actuators and promising technology for soft robotics. DEAs are compliant (typical elastic modulus of ~1 MPa), fast (1 kHz bandwidth), efficient (theoretically maximum 90 % of electromechanical efficiency), and exhibit large actuation strokes (more than 100 %). Because of these facts, DEAs have been applied to various robots and systems.
Shintake and colleagues at the University of Electro-Communications, Japan, and at the Swiss Federal Institute of Technology in Lausanne, Switzerland developed a DEA based soft biomimetic gripper than can handle diverse objects with its simple structure. The idea behind it is the modification of the electrodes in DEA that enables electrically controlled adhesion as well as actuation.
Reference
