
September 2018 Issue
Researcher Video Profiles
Shunta Togo, Assistant Professor, Graduate School of Informatics and Engineering.
The objective of Shunta Togo's research is to elucidate a control mechanism of redundant human body and apply it for robot control. Humans can perform flexible and varied movements by co-ordinated control of their redundant joints and muscles. By elucidating such a dextrous control mechanism, Togo would like to achieve human like control of a robot, especially of the man-machine fusion system, such as a prosthetic hand.
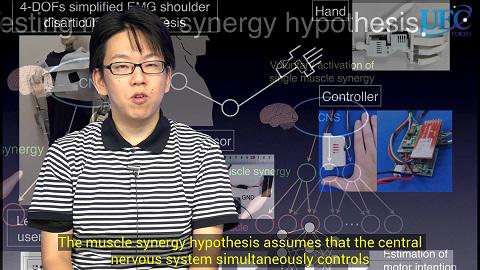
In the field of computational neuroscience, Togo's approach is the control mechanism of human multi-muscle based on the muscle synergy hypothesis. The muscle synergy hypothesis assumes that the central nervous system simultaneously controls some muscles, to simplify the control problem.
Togo experimentally tested the hypothesis that humans can voluntarily control muscle synergies. In the field of robotics, on the other hand, he developed shoulder disarticulation prosthesis, controlled by using muscle activity information. The shoulder disarticulation prosthesis is a robotic arm for people who have lost their arm.
Togo's research group developed a simplified shoulder disarticulation prosthesis with a low degree of freedom and learning function. The robot arm learns the user's muscle activity pattern and applies it to robot control. So, the user can intuitively control the robotic arm without long term training. In evaluation experiments, users could achieve pick and place movements for simple objects.
In future, Togo would like to develop a shoulder disarticulation prosthesis which can achieve more flexible and variety of movements by applying the control strategy of the human body.
Further information
Shunta Togo
Assistant Professor, Graduate School of Informatics and Engineering, The University of Electro-Communications, Tokyo.
Department website: http://kjk.office.uec.ac.jp/Profiles/72/0007173/prof_e.html
Research Highlight: Elucidating mechanisms of voluntary control of human multi-muscle