
Topics - e-Bulletin
University of Electro-Communications publishes the September 2021 issue of UEC e-Bulletin
The September 2021 issue of the UEC e-Bulletin includes a video profile of UEC Associate Professor Shouhei Kidera where he describes his recent research on “Radar-based human recognition for self-driving cars”.
The Research Highlights are, Radar-based human recognition for self-driving cars,' Shouhei Kidera; and ‘Getting the most out of quantum systems,' Jun Suzuki.
The Topics is an interview with Yoshihiro Nakata, Associate Professor at the School of Informatics and Engineering, Department of Mechanical and Intelligent Systems Engineering, offering insights into ‘creating robots to coexist in harmony with humans in the real world’.
The News and Events describes research by Hiroshi Kohsaka on the ‘relationship between the speed at which insects move and the environmental temperature’.
Research Highlights
Recognition technology
Radar-based human recognition for self-driving cars
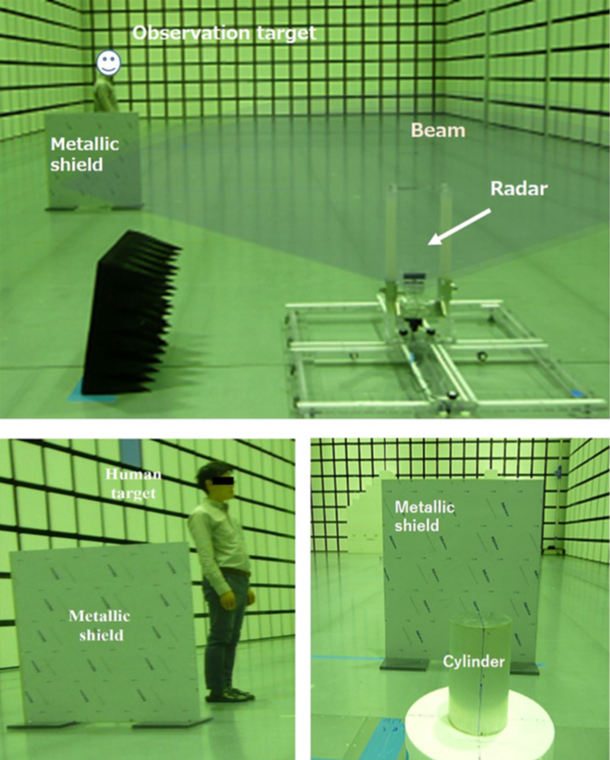
Self-driving car technology requires detectors capable of sensing a car’s environment, also in situations of limited visibility like bad weather conditions. Radar-based sensors have emerged as an essential component of driver assistance systems and self-driving vehicles, as they can robustly distinguish nearby pedestrians and other traffic-relevant objects. Apart from being applicable in bad weather, artificial recognition systems also need to be capable of dealing with so-called non-line-of-sight (NLOS) situations, when the line of sight between detector and object is obstructed. In traffic, NLOS situations occur when pedestrians are blocked from sight; for example, a child behind a parked car, about to run suddenly into the street. Now, Shouhei Kidera from the University of Electro-Communications and colleagues have developed a radar-based detection method for recognizing humans in NLOS situations. The scheme is based on reflection and diffraction signal analysis and machine-learning techniques.
Quantum state estimation
Getting the most out of quantum systems

Quantitative information about a physical system comes in the form of numbers following from the system’s mathematical description — equations capturing the physical processes involved. In classical physics, it is in principle possible to retrieve, by means of measurements, the complete information of a system. According to quantum mechanics, however, one can never obtain all information of a system with infinite precision because of the quantum-mechanical uncertainty principle stating that certain pairs of quantities (e.g. momentum and position) cannot be measured simultaneously with absolute certainty.
Researcher Video Profiles
Shouhei Kidera, Associate Professor Department of Informatics Graduate School of Informatics and Engineering University of Electro-Communications, Tokyo
Radar-based human recognition for self-driving cars
Topics
Creating robots to coexist in harmony with humans in the real world
“The is extensive research on autonomous robots and androids that look and behave like humans”, says Yoshihiro Nakata, an associate professor at the School of Informatics and Engineering, UEC Tokyo. “Ultimately, in order for robots to become an integral and functional part of modern society, they must be able to move freely within everyday social settings alongside humans, without danger or concern. The key to realizing such a society is for robots to be able to “gently interact” with humans without the unnatural rigid movements associated with conventional robots. To achieve a society of “gentle robots” it is necessary to develop new generations of actuator technology. This is the goal of my research. Namely, to develop actuators for powering “gentle and socially acceptable robots.”
News and Events
Relationship between the speed at which insects move and the environmental temperature
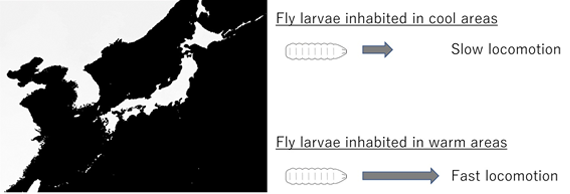
Hiroshi Kohsaka an associate professor at UEC Tokyo, and colleagues report that the speed of movement of fly larvae varies from species to species. Furthermore, they found that larvae in cold regions tend to move slowly, and those in warm regions move faster. These results suggest that environmental diversity has contributed to the evolution of the diverse movement patterns exhibited by animals.